超高压直流阀厅套管智能维修系统
张裕汉 万施霖 王祥 张瑞亮 金鑫




摘要:直流套管是直流输电工程中最重要的设备之一。直流阀厅内部高压套管使用时间通常较长,是故障高发部件。为实现对套管运行维修工程的全面、智能化管理,根据套管运维的实际工作特点和技术需求,采用包括深度神经网络、大数据分析技术、先进动态路径规划算法等在内的最新技术,提出了一种面向超高压直流阀厅的套管维修系统。
关键词:超高压直流阀厅;套管;维修系统;拆卸平台;设备巡视;多源视频监控
发展超高压交直流输电是缓解我国电力供应紧张状况的有效途径,也是改善电网结构,促进全国联网的需求。自向-上、云-广两条超高压直流输电工程投入商业运行后,超高压直流输电工程在我国蓬勃发展,将逐渐成为我国未来远距离大容量输电工程的主流[1-3]。
高压直流穿墙套管是换流站中不可缺少的主设备之一,起到连接阀厅内外电气设备的作用[4-5]。由于直流阀厅内部高压套管使用时间较长,属于故障高发部件。
套管由于自身质量及拆装尺寸等原因,传统拆装工艺需使用吊车。由于阀厅内净空不足及阀厅隔墙的阻挡,吊车无法在阀厅内部起吊套管,只能使用牵引车将换流变牵引至空旷处,采用吊车起吊拆装套管的方式[6-7]。
套管因安装精度低、安装时的碰撞磨损、运行维护不当、维修不及时等方面,都易造成绝缘损坏、老化,产生绝缘击穿,产生高温使套管爆炸起火,从而引发电力火灾事件,给人民群众的生命财产安全造成严重威胁及损失。
为此,文章提出了一个面向超高压直流阀厅的套管维修系统,其包括智能拆卸平台、运输机器人、大数据分析系统、多源视频监控系统、智能巡视系统五个部分,为套管的运行维护工程提供了全面、智能化的管理与辅助,也将为电力火灾事故防范于未然做好准备。
1 智能拆卸平台
本维修系统采用了一种直流阀厅内部高压套管智能拆卸平台,其可在阀厅内操作,直流阀厅内部高压套管智能拆卸平台直接驶入阀厅内,直接在阀厅内进行套管拆装作业流程。采用伸缩臂固定套管,通过伸缩、旋转将套管拆装或放置在阀厅内的运转装置,该运转装置由安顺换流站提供。避免了牵引换流变的工作流程,节省了大量的作业时间和隐性成本。
1.1 平台整体结构
经初步设计,直流阀厅内部高压套管智能拆卸平台由移动底盘、平衡支腿装置、升降装置(变幅大臂、伸缩臂、变幅油缸、伸缩油缸)、头部旋转装置(旋转控制盘)、滑轨(套管吊臂、吊钩)装置等部分组成。平台可在场地内自由移动,四个支腿具有独立调节高度功能,底盘上安装有水平仪,可通过调节四个支腿使得平台底盘水平,支撑架可旋转,机械手臂可伸缩,工装部分可旋转和伸缩。直流阀厅内部高压套管智能拆卸平台的原理如图1所示。
1.2 关键技术
为实现拆卸平台的智能性与安全性,以及专用功能机构有机组合。本系统采取的工艺设计与装置选择均基于超高压直流阀厅设计的技术规定、理论参数与现场勘测[8-9]。
1.2.1 平台平衡支撑、配重计算及设计
当直流阀厅内部高压套管智能安装平台吊起1750kg套管,升降大臂伸到最长,变幅油缸缩到最短时,且升降装置转到与底盘正常前进方向成90度时,底盘受力状态最差,根据力矩的计算公式:
式中:F表示作用力,L表示力臂,M是作用力F对转动轴的力矩。
根据公式(1)计算可得套管端相对支腿的力矩21.42吨米,大于底盘端相对支腿的力矩18.13吨米,因此存在倾翻可能,若一定要在此环境下使用,则底盘须加配重1400kg。
经现场勘测,场地限制条件不多,则考虑在操作工程设置位置安全保护,在大臂伸出状态不允许大臂角度降到30度以下,此时据公式(1)计算可得套管端相对支腿的力矩16.8吨米小于底盘端相对支腿的力矩18.13吨米,因此,底盘不须加配重也能保证不会倾翻。
1.2.2 机械臂受力计算及材料选型
初选机械臂壁厚为20mm,当直流阀厅内部高压套管智能安装平台吊起1750kg套管,升降大臂伸到最长,变幅油缸缩到最短时,此时机械臂各部件受力情况最差。设备工作过程中无冲击,受力模式为静应力模式。机械臂共分为三段,采用第三强度理论进行计算,公式为:
式中:为弯曲应力,为切应力。
根据公式(2),计算可得最小臂极限点受力为3.17MPa,次小臂极限点受力为5.63MPa,大臂极限点受力5.03MPa。
通过比较,得到次小臂受力状态最差。近似取,代入公式(2)可得为7.96MPa。
按照焊接性能很好、力學性能相对一般的材料Q235A来考虑。Q235A材料许用应力(屈服强度)为235MPa,远小于。
复合安全系数的计算公式为:
式中:[S]为许用复合安全系数。
近似取,可得。起重作业机构许用最小安全系数[S]一般大于5,S远大于[S]。
可以进行一次优化设计:
选机械臂壁厚为10mm,对次小臂进行核算。
此时,,远小于。依然大于[S],满足要求。
1.2.3 工装零部件选型
直流阀厅内部高压套管智能拆卸平台的工装零部件如表1所示。
1.2.4 底盘选型设计
选用10t麦轮底盘增配液压支腿作为直流阀厅内部高压套管智能拆卸平台底盘,其设计参数如表2所示。
1.3 工作过程分析
直流阀厅内部高压套管智能拆卸平台的工作过程如下。
(1)套管拆卸时,首先通过电控设备移动底盘把装置移动到换流变套管旁边,使装置行走方向与换流变套管轴线在地面上的投影呈90度角,并尽量靠近套管的适合操作的位置上。
(2)通过平衡支腿装置把整个装置支撑起来,通过升降装置把滑轨移动到需拆卸套管正上方,通过旋转控制盘调整滑轨角度,使之与套管轴线基本平行,调整套管吊臂长度使之与需拆卸套管匹配,运用吊钩及辅助吊绳把需拆卸套管吊住,人工拆卸套管安装螺钉,并使用专用工具把套管从安装法兰上顶开,操纵套管吊臂顺着套管轴线方向平稳移动,直至套管从安装法兰上完全脱开。
(3)通过升降装置、旋转控制盘的运动,把拆卸套管放置到地面专门运送套管的小车上,完成套管拆卸,并反向执行拆卸动作,把新套管安装到换流变上,完成整个工作流程。
2 运输机器人
在直流阀厅障碍物固定不变的情况下,运输机器人可以利用传统A*算法躲避障碍物来运输套管[10]。但是,现实的直流阀厅的障碍物不是一成不变的,而运输机器人虽然可以利用动态窗口法(Dynamic Window Approach, DWA)躲避动态障碍物,但是由于动态窗口法是局部路径规划算法,在没有全局最优路线引导的情况下,运输机器人很容易陷入局部最优解,而无法达到目的地[11]。
辛煜等[12]提出了一种通过重新定义中心节点的位置,在每个节点的周围扩大无限可搜索邻域的算法(以下称为A*-INF算法)。程传奇等[13]提出了一种基于A*算法和关键点选取策略的算法(以下称为A*-SS算法)。王洪斌等[14]提出了一种结合预瞄偏差角追踪法和二次A*的路径规划算法(以下称为A*-QAA算法)。
本维修系统中的运输机器人则采用融合A*算法和动态窗口法的全局动态路径规划方法,以下简称DWA*算法。
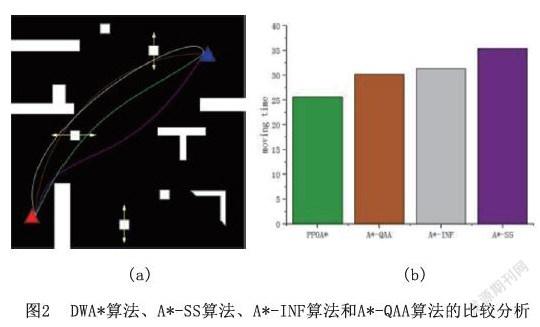
为了验证本文提出的DWA*算法的有效性,以某电网某输电公司的直流阀厅中的障碍物实际分布情况为仿真环境,比较了其与类似算法的效率。
结果如图2所示,绿色轨迹、紫色轨迹、灰色轨迹和棕色轨迹分别由DWA*算法、A*-SS算法、A*-INF算法和A*-QAA算法解出。
图(a)中,四种算法都成功地找到了无碰撞路径。图(b)在这四种算法中,提出的DWA*算法找到了行程时间最短的路径。
实验结果表明:融合算法与传统A*算法相比,路径更加平滑、具有实时避障的功能,还可以输出运动参数,有利于运输机器人的自动反馈控制;与动态窗口法相比,可以保证全局最优、路径长度更短。
3 大数据分析系统
大数据分析和人工智能技术已经被研究并应用于电力系统工程的许多部分。以往研究的一个缺点是,它们侧重于变压器,特别是绕组和铁芯,忽略了套管,而套管是许多变压器故障的根本原因。
超高压直流阀厅的套管运维数据主要具有如下几个特点:(1)体量大、多源性;(2)故障数据较少,因此需要在海量的运维数据中挖掘出重要的故障信息;(3)运维数据常常分布在不同的监测系统中,监测指标缺少融贯性。
针对套管运维数据的上述特点,本维修系统采用基于大数据分析技术的运维框架,其包括如下五个层次:(1)数据来源层;(2)数据处理层;(3)特征分析层;(4)模型计算层;(5)运维应用层。
其中,在最核心的模型计算层中,主要包括:(1)专家知识库;(2)知识转移(knowledgetransfer)算法;(3)深度神经网络(DeepNeuralNetworks,DNN)三个部分。通过知识转移算法将专家知识库中的领域知识(domainknowledge)转化成DNN中的初始参数,再进行DNN的调试,从而能在较少的故障数据下实现高效的模型计算和分析。
我们利用了60000条套管故障数据对本文提出的事后故障分析算法的性能進行评估,其中训练集、验证集和测试集数据分别为36000条、12000条和12000条。表3显示和训练准确率、实际准确率和神经元个数、迭代次数、训练时间的关系。
由表3可以看出,本文所提出的故障分析算法的分类准确率可达98%左右。
4 多源视频监控系统
由于超高压套管维修施工面积大、现场施工设施和环境复杂等情况,采用常规的有源布线式视频监控设备,需要在施工现场布设大量的供电线路、网络传输线路,不仅影响现场施工作业,还容易发生因施工作业导致线路中断的问题。同时,仅靠管理人员来识别监控视频中的异常行为,存在发现不及时、误判等情况,难以达到及时监督制止现场问题的目的。
本文提出了一种针对套管维修工程现场的视频监控系统,包括前端的监控摄像头、通信网络、视频服务管理平台、视频画面展示窗口,而超高压直流阀厅的套管维修工程现场的视频监控需要重点考虑监控摄像头的可移动性、覆盖范围、电源和网络线路布设需求情况等[15-17]。
针对套管维修工程现场的施工特点,本维修系统主要由三部分构成:(1)现场视频监控硬件,包括移动4G布控球机、移动单兵、无人机、复眼阵列相机等;(2)物联管理平台。套管维修工程现场中存在多种监控设备,因此本系统采用物联管理平台进行统一的设备参数配置,管理各个设备间的拓扑关系,从而实现多种设备间高效的同步监控;(3)图像分析与异常识别子系统。对视频监控设备采集到的图像,根据预设的问题类型,使用基于YOLOV4的卷积神经网络(Convolutional Neural Networks, CNN)进行典型违章及异常问题的识别。
本文所提出的视频监控系统的整体框架如图3所示。
5 智能巡视系统
在电网智能化的背景下,如何用较少的运维人员确保设备巡视的全面性、及时性、精准性,是超高压直流阀厅的套管运行维护所需要解决的突出问题[18-20]。
变电站智能巡检机器人配备了红外成像传感器、可见光传感器、激光雷达传感器、惯性测量单元(IMU)等多种类型的传感器,被广泛部署在大型变电站,以降低成本,提高效率。
本維修系统采用智能机器人对超高压直流阀厅的套管维修进行巡视,主要包括基站层、通讯层和终端层三部分。其中:(1)基站层由监控后台、录像系统及智能控制和分析软件系统组成;(2)通讯层由网络交换机、无线网桥等设备组成;(3)终端层包括巡视机器人、充电小室和固定监测点等。智能机器人巡视又可以进一步分为红外测温巡视、设备外观巡视、设备仪表巡视等。
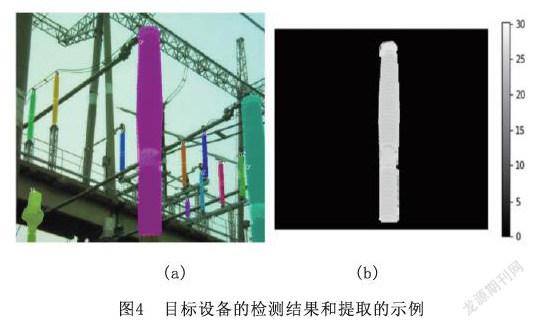
同时,我们开发了一种支持深度学习加速的新型变电站检测机器人。与传统机器人相比,该机器人采用低功耗、高性能的JetsonTX2模块专门用于深度学习硬件加速,并采用TensorRT进行软件加速。对物体检测和故障诊断任务的测试和演示表明,检测精度高,计算速度快,能够满足实时应用。
图4显示了智能机器人的设备检测结果。其中:(a)是可见光图像的分割结果,(b)是提取的目标设备的热图像。
6 结语
文章提出了一种面向直流阀厅内部高压套管的维修系统,采用深度神经网络、大数据分析技术、先进动态路径规划算法等在内的最新技术,将智能拆卸平台、运输机器人、大数据分析系统、多源视频监控系统、智能巡视系统等子系统进行有机组合,实现了对超高压直流阀厅套管维修的全面、精细化、高时效的智能管理辅助。通过上述技术手段的实施,在降低安装时间、减少安装过程中的碰撞磨损之外,也能大幅度降低绝缘损坏与老化的风险,有效地消除了电气火灾隐患,从而在源头上加强了消防安全管控,预防火灾事故的发生。在安全生产之余,将研究基于可见光或无线电波通信的三维定位技术,进一步提高套管安装的精度。
参考文献:
[1]中国电机工程学会信息化专委会.中国电力大数据发展白皮书[R].北京:中国电机工程学会, 2013.
[2]王道翔.新基建中交通网与能源网的发展机遇[J].杭州金融研修学院学报, 2020(04):19-22.
[3]林曈.特高压交直流输电系统技术经济分析[J].企业改革与管理,2020(20):
221-222.
[4]刘振亚.特高压直流电气设备[M].北京:中国电力出版社,2009.
[5]刘振亚.特高压交直流电网[M].北京:中国电力出版社,2013.
[6]李穆,卢文华,向冬冬.输变电设备智能化运维系统研究与应用[J].电气工程学报,2015(07):75-81.
[7]FU M, SONG J, ZHAO J, et al. Intelligent Operation and Maintenance of Micro-grid Technology and System Development[J]. IOP Conference Series Earth and Environmental Science, 2018, 108(5):052060-052060.
[8]DL-T 5223-2005,高压直流换流站设计技术规定[S].
[9]SHEN W, KE C, WANG H, et al.Muti-parameter diagnosis of HVDC bushing[J].High Volt. Eng.2012,38(3):
616-622.
[10]王殿君.基于改进A*算法的室内移动机器人路径规划[J].清华大学学报(自然科学版),2012,52(08):1085-1089.
[11]FOX D, BURGARD W, THRUN S. The dynamic windowapproach to collision avoidance[J].IEEE Robotics &Automation Magazine,1997,4(1):23-33.
[12]辛煜,梁华为,杜明博,等.一种可搜索无限个邻域的改进A*算法[J].机器人,2014,36(05):627-633.
[13]程传奇,郝向阳,李建胜,等.融合改进A*算法和动态窗口法的全局动态路径规划[J].西安交通大学学报,2017,51(11):137-143.
[14]王洪斌,尹鹏衡,郑维,等.基于改进的A*算法与动态窗口法的移动机器人路径规划[J].机器人,2020,42(03):346-353.
[15]高琳.视频监控技术在电网基建工程管理中的应用[J].电子测试,2019,(10):78-79.
[16]岳长城,周扬,陈晓捷.柔性直流换流站阀厅及交流耗能装置室辅助综合监控系统实施方案[J].电工技术,2020(23):15-16+21.
[17]陆勇,王世巍,李攀,等.特高压换流站工程多源视频智能监控研究[J].现代工业经济和信息化,2020,10(11):60-61.
[18]QGDW 11513.1—2016 变电站智能机器人巡检系统技术规范[S].
[19]杨清民,陈炜智,韦明.对于变电站智能巡检机器人的几点思考[J].电力设备管理,2021(03):37-39.
[20]王娟,李晓丽.电站智能巡检机器人运行维护及问题处理[J].电子测试,2021(06):113-114.
Abstract:DC bushing is one of the most important pieces of equipment in DC transmission projects. In order to realize comprehensive and intelligent management of bushing operation and maintenance works, a bushing maintenance system for EHV DC valve hall is proposed based on the actual working characteristics and technical requirements of bushing operation and maintenance, using the latest technologies including deep neural networks, big data analysis technology, advanced dynamic path planning algorithm.
Keywords:EHV DC valve hall; bushing; maintenance system; disassembly and installation platform; equipment inspection; multi-source video monitoring
猜你喜欢套管基于有限元的±800kV换流变抗震性能分析科技创新与应用(2020年35期)2020-12-08小修浅表取换套技术及应用石油研究(2020年7期)2020-09-07套管整形技术在恢复长停井中的应用智富时代(2019年2期)2019-04-18套管整形技术在恢复长停井中的应用智富时代(2019年2期)2019-04-18套管磨损机理研究智富时代(2018年7期)2018-09-03套管磨损机理研究智富时代(2018年7期)2018-09-039—5/8″技术套管旋转固井技术在中海油的首次成功应用科技视界(2017年13期)2017-09-30500kV变压器、电抗器的套管事故分析及预防中文信息(2016年6期)2016-10-21浅谈如何加强套管钻井技术的研究科技致富向导(2013年12期)2013-07-05作业施工对套管的损坏及预防措施新媒体研究(2009年17期)2009-10-19