基于QT的雷达目标跟踪系统设计实现
王晋晶 汪枫 刘润华 谢超




摘 要:现代雷达面临的环境日益复杂,空中目标可能达到几百甚至上千批,并采用各种协同或非协同方式机动,无处不在的噪声、杂波和干扰也带来大量不确定性。针对日益复杂的现场态势,本文提出一种基于QT平台雷达目标跟踪系统的设计方案。该系统能根据环境自适应选择跟踪算法,实现目标跟踪处理和目标信息实时显示的功能。系统功能较为完备、界面友好,具有易操作、易维护、可移植到多种平台等优点。
关键词:QT平台;目标跟踪;信息显示
雷达目标跟踪系统是操作员与雷达系统进行交互的一个重要平台,主要负责目标跟踪处理和目标信息实时显示,实现操作员对战场状态的监控。目前QT开发框架相比于其他开发产品,界面化程度更高,而且QT界面构建更直观、迅速、简洁,因此本文选用QT进行软件开发。QT作为一个跨平台开发框架非常完备,不仅提供了集成开发环境IDE和跨平台开发工具QT Creator,而且QT的类库非常丰富,包含多种对象模型、集合类、图形用户界面编程和布局设计功能等,适用于开发高性能、跨平台的人机交互界面。
1 系统总体架构
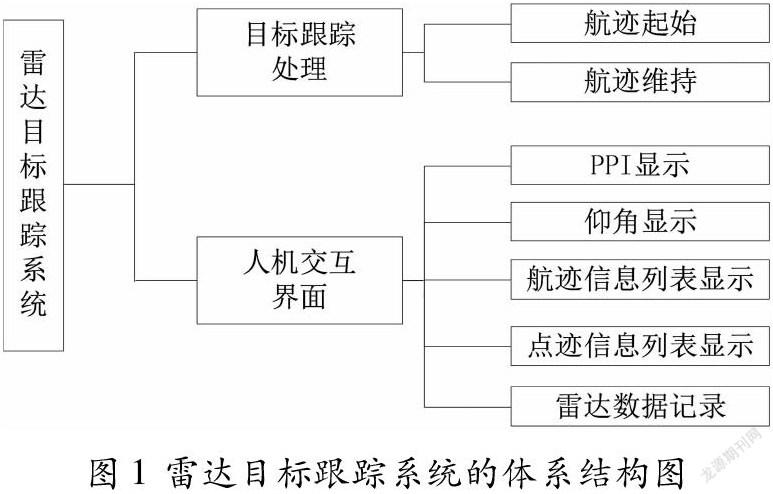
雷达目标跟踪系统主要由目标跟踪处理和人机交互界面两大模块组成,如图1所示。目标跟踪处理模块能根据背景环境中的目标和杂波等信息自适应选择跟踪算法,完成航迹处理,其主要包含航迹起始模块和航迹维持模块。人机交互界面主要完成目标信息的实时显示与雷达工作参数设置功能。目标信息的实时显示包括图像显示、航迹信息列表显示等,目标图像显示可以直观展示目标实时位置和目标航迹,航迹信息列表显示则详尽显示目标的运动状态,如速度、加速度、航向等,以便操作员做出正确的判断。
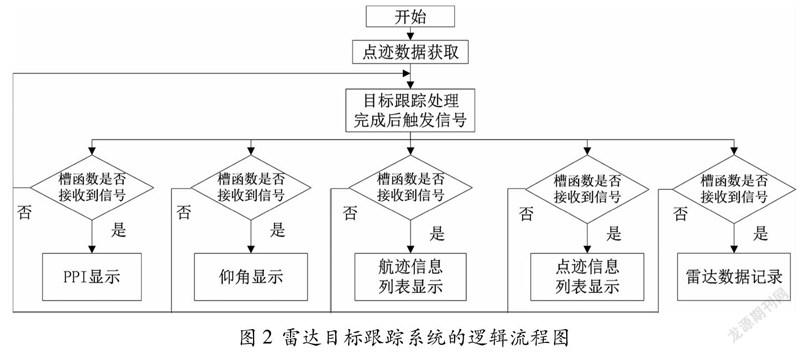
整个雷达目标跟踪系统基于QT的插件架构实现。插件架构可以将系统中多个独立的功能模块封装到一个个插件中,然后利用插件管理器管理所有插件。在开发阶段或后期维护阶段各插件模块可独立进行改动和升级,因此系统具有良好的可维护性和可扩展性。因此在本系统中,将航迹起始、航迹维持、PPI显示、仰角显示、航迹信息列表显示、点迹信息列表显示和雷达数据记录这七个功能模块分别封装到七个插件中。使用插件架构后,雷达目标跟踪系统的逻辑流程图如图2所示。首先获取恒虚警处理后过门限的点迹数据,然后使用航迹起始插件和航迹维持插件进行目标跟踪处理,跟踪结束后就会触发信号发送目标信息,在该信号连接的槽函数接收到信号后就会立刻响应完成各插件的功能。
本系统中QT的信号和槽通信机制起到至关重要的作用,该机制是QT独有的功能。在任意QT对象中均能设置信号函数或槽函数,当一个信号被触发后,与其相连接的一個或多个槽函数就会自动响应。因此通过该机制可以实现任意两个QT对象通信,完成插件间数据的快速传输。
2 目标跟踪处理模块实现
目标跟踪处理就是对雷达的量测值进行处理,给出正确和精确的目标航迹数据。在雷达进行目标跟踪处理时一般采取分区处理,将雷达扫描1周所形成的区域平均划分成多个扇区,在进行跟踪处理时依次对每个扇区进行处理。分区处理可以降低计算机运算量,从而保证目标跟踪处理的实时性。
目标跟踪处理的流程图如图3所示,目标跟踪处理按扇区依次进行。在点航互联中必须按照一定的优先级:固定航迹最高,可靠航迹较高,暂时航迹次之,可能航迹最低。因此在目标跟踪处理模块中,首先判断点迹是否属于固定航迹,即是否属于固定杂波。然后判断可靠航迹是否为空,若不为空则按照优先级先在航迹维持模块中进行点迹与可靠航迹的互联,紧接着再在航迹起始模块中进行点迹与暂时航迹、可能航迹的互联;若为空则直接进入航迹起始模块。最后进行剩余点迹的处理,主要是将未互联成功的点迹存入可能航迹容器中,等待下一天线扫描周期再进行航迹起始操作。点迹和航迹的容器均使用QHash类实现。
2.1 航迹起始模块的实现
为快速起始目标航迹,并降低杂波起始成功的概率,选用滑窗法的3/3逻辑,即在连续3次雷达扫描的时间窗内,只有检测数达到3时航迹起始才成功。航迹起始模块的逻辑流程图如图4所示。
在航迹起始模块中,暂时航迹是指由两个点迹组成的航迹,可能航迹是指由一个点迹组成的航迹。当前扇区的点迹先与暂时航迹进行互联,未能互联成功的再与可能航迹进行互联。由于进行目标跟踪处理时采用了分区处理,并且目标有可能跨越扇区运动,因此遍历航迹容器中的航迹时仅需遍历当前及相邻扇区内的航迹,而无须遍历所有航迹。
2.2 航迹维持模块的实现
航迹维持的关键是为可靠航迹匹配上目标量测点。本跟踪系统中,为保证可靠航迹与正确量测点的有效互联,可根据背景环境自适应选择跟踪算法,并在跟踪过程中依据航迹质量情况在大、中、小三种波门之间进行调整。航迹维持模块的逻辑流程图如图5所示。
在航迹维持模块中,首先对当前扇区内的杂波和目标进行统计。然后依次对当前扇区和相邻扇区内的可靠航迹进行处理,在每次处理之前,需要先根据该航迹的航迹质量情况在大、中、小三种波门之间调整,以此提高捕获目标点迹的概率,同时使波门的无关点迹尽可能少。最后进行点迹与可靠航迹的互联,若互联成功则根据杂波和目标统计结果选择一种数据互联算法来更新航迹,模块中内置了数据互联算法有最近邻域(NN)、概率数据互联(PDA)、交互多模型概率数据互联(IMMPDA)、联合概率数据互联(JPDA)和经验JPDA算法等。
3 终端显控界面实现
终端显控界面实现涉及PPI显示、仰角显示、航迹信息列表显示、点迹信息列表显示和雷达数据记录插件的实现。下面以PPI显示插件和航迹信息列表显示插件这两个插件为例介绍其实现过程。
3.1 PPI显示模块的实现
QT的图形视图框架结构非常适用于雷达PPI显示的实现,其三个组成部分为场景、视图和图元。在PPI显示插件的实现中,先设计并实现PPI显示中用到的多种图元,如坐标轴图元、目标航迹图元、航迹号图元、扫描线图元和雷达余晖图元等,再利用场景加载各种图元,最后用视图对场景中的所有图元进行显示。各类图元的设计比较复杂。扫描线图元可利用QGraphicsLineItem类实现,扫描线的旋转操作可通过函数setRotation设置旋转角度来实现。雷达余晖图元是通过QConicalGradient类的圆锥式渐变效果来实现的。目标航迹图元则比较复杂,因航迹包括当前航迹点迹和若干有序的历史航迹点迹,因此需要添加航迹容器来存储目标航迹信息,目标航迹图元是通过继承图元基类QGraphicsItem类,并在类中添加航迹容器来实现。
在雷达进行PPI显示时,屏幕刷新动作由定时器事件QTimerEvent类实现,屏幕刷新的时间间隔在定时器事件中设定。在每次屏幕刷新时,首先获取當前扇区对应的方位角,一方面是据此设置扫描线和余晖的角度,完成扫描线和余晖的转动。另一方面是据此获得该扇区的目标航迹信息,完成目标航迹的更新。在屏幕刷新时如果每次都重绘所有图元,势必会占用大量内存,极有可能产生界面卡顿情况。为提高显示的流畅度,在每次进行屏幕刷新时,只重绘扫描线图元、雷达余晖图元和目标航迹图元,在显示量程没有改变情况下无须重绘坐标轴图元。
在PPI显示视图中还实现了多种人机交互功能,如更改显示量程、视图缩放倍数的显示、当前鼠标坐标位置的显示等。其中最重要的是更改显示量程,使用视图类QGraphicsView中的函数voidscale来实现显示量程的放大和缩小。如果需要观察目标细节,可减小显示量程从而放大视图,如果需要在更大范围内监视目标,则增大显示量程从而缩小显示视图。
3.2 航迹信息列表显示模块的实现
航迹信息列表显示插件采用QT的模型视图结构来实现,它将数据与视图分离,使得系统开发更为简洁和灵活。模型视图结构主要包含模型、视图和代理三部分。在航迹信息列表显示插件的实现中,使用QT中预置的QAbstractTableModel类实现表格模型,在模型中有用于列表显示中数据的数据结构。使用QTableView类实现表格视图,使用setModel函数即可使用该视图显示模型中的项目。其中QTableView类提供了默认的代理实现类QItemDelegate,通过代理能够自定义数据条目的显示方式。完成模型、视图和代理的设计就完成了航迹信息列表显示的框架。航迹信息的实时显示比较简单,只需通过航迹编号获得该航迹位于航迹列表中的行数,然后对该行航迹信息进行更新即可。
4 系统测试
在windows操作系统上使用QTCreator开发雷达目标跟踪系统,接入某型雷达的实测数据后运行结果如图6和图7所示。从运行结果可看出,本跟踪系统界面美观、操作便捷、功能较为丰富,能正确实现对多种目标,如航迹交叉、机动目标的稳定跟踪,并能以多种显示方式实时显示目标航迹图像和航迹信息。
结语
本文在windows操作系统下,利用QT开发雷达目标跟踪系统,该系统能够根据环境自适应选择目标跟踪算法,实现目标跟踪处理和目标信息实时显示的功能。基于QT平台也使本系统具有高稳定性、高可移植性、强实用性等多种优点。而且本系统不仅可以接入仿真数据,还能接入实测数据,能应用于教学研究、实验测试和系统联调等多种场景。
参考文献:
[1]Yaakov B S,Thomas E F.Tracking and data association[M].America:Elsevier Science,1988.
[2]何友,修建娟,关欣.雷达数据处理及应用[M].北京:电子工业出版社,2013.
[3]金大,张红艳.Qt5开发实战[M].北京:人民邮电出版社,2015.
[4]陆文周.Qt5开发及实例(第3版)[M].北京:电子工业出版社,2017.
[5]王晋晶.雷达目标跟踪算法研究与实现[D].西安电子科技大学,2019.
作者简介:王晋晶,女,硕士,信号与信息处理专业,主要研究方向为雷达目标跟踪处理;汪枫,女,硕士,副教授,主要研究方向为新体制雷达目标检测、成像、识别理论和方法;刘润华,女,硕士,教授,主要研究方向为雷达目标检测、成像、识别理论和方法;谢超,男,博士,主要研究方向为新体制雷达目标检测、成像理论和方法。
猜你喜欢 目标跟踪 基于DeepSORT与改进YOLOv3的车间安全帽检测系统研究电脑知识与技术(2022年5期)2022-04-11基于深度学习的目标跟踪算法研究现状及发展趋势现代信息科技(2021年8期)2021-11-03基于相关滤波的重检测目标跟踪算法软件导刊(2020年10期)2020-12-01基于单目摄像机的无人机动态目标实时跟踪科技创新与应用(2020年8期)2020-03-13分离窗口快速尺度自适应目标跟踪算法计算机应用(2019年4期)2019-08-01基于单目视觉的后方车况监测装置设计山东工业技术(2018年5期)2018-03-10基于改进高斯混合模型的体育视频运动目标检测与跟踪现代电子技术(2017年19期)2017-10-12视频序列中运动车辆检测和跟踪方法的研究科技与创新(2017年4期)2017-03-25基于卡尔曼滤波的单模型目标跟踪算法的仿真研究中国新通信(2016年10期)2016-07-04基于视觉传感网络的目标跟踪系统设计现代电子技术(2016年8期)2016-05-14